シナリオの記述方法
シナリオの記述方法について解説します。
シナリオはjson形式で記述します。
サンプルのシナリオファイルが~/ScenarioExecutor/scenariosフォルダ内にありますので、参考にしてください。
シナリオの記述内容は大きく4つのブロックに分かれています。
| ブロック | 記述内容 |
|---|---|
| map_id | RoadEditorのIDを指定します。 |
| actors | シナリオに登場する自車両、他車両、歩行者、障害物の情報を記述します。 |
| scenario | さまざまなシーンを定義し、シーン中にアクターがどのように振舞うか、シーン間をどのような条件で遷移するかを記述します。 |
| stop_condition | シナリオの終了条件を記述します。 |
-
map_id
RoadEditorのIDを指定します。
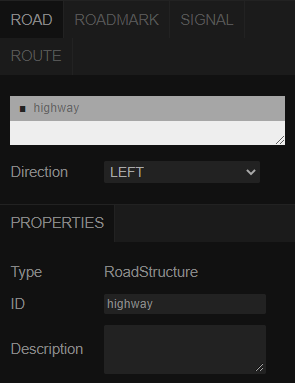
"map_id": "highway" -
actors
シナリオ内に登場するアクターを定義します。- ego
自車両を定義します。- actor_id (int)
アクターのIDを指定します。アクターが複数存在する場合、重複しない値を指定します。 - model_id (string)
車種のIDを指定します。CARLAで定義されている車種のIDを指定します。
現在、シナリオから自車両の車種を指定することはできません。ros-bridge 0.9.11ではros-bridge/carla_spawn_objects/config/objects.json内で自車両の車種を指定します。 - color (string)
車両の色を指定します(RGB16進数)。
現在、シナリオから自車両の色を指定することはできません。ros-bridgeの仕様でランダムになっています。
- actor_id (int)
- others
他車両、歩行者等の障害物を定義します。-
actor_id (int) -
egoのactor_idと同じです。 -
model_id (string)
他車両として指定できるIDは以下になります。model_id vehicle.audi.a2vehicle.audi.etronvehicle.audi.ttvehicle.bmw.grandtourervehicle.chevrolet.impalavehicle.charger2020.charger2020vehicle.garden.gambulancejpvehicle.garden.gpolicecarjpvehicle.garden.gpumperjpvehicle.lincoln2020.mkz2020vehicle.mercedesccc.mercedescccvehicle.mini.cooperstvehicle.nissan.micravehicle.tesla.model3vehicle.toyota.priusvehicle.volkswagen.t2vehicle.kawasaki.ninja -
color (string) -
egoのcolorと同じです。
-
"actors": { "ego": { "actor_id": 0, "model_id": "vehicle.toyota.prius", "color": "000000" }, "others": [ { "actor_id": 1, "model_id": "vehicle.nissan.micra", "color": "ff0000" }, { "actor_id": 2, "model_id": "vehicle.kawasaki.ninja", "color": "00ff00" } ] } - ego
-
scenario
シナリオを定義します。
シナリオはオープニングシーンから始まり、さまざまなシーンへの遷移を経て、最終的にエンディングシーンに遷移して終了となります。-
opening_scene
各アクターの初期状態を定義します。- ego
自車両の初期状態を定義します。- start_position
自車両の初期位置を指定します。
wp_idとwp_idxで指定したウェイポイントの座標が自車両の初期位置になります。- wp_id (string)
ウェイポイントID(RoadEditorでルートを定義した際に付けた名前)を指定します。
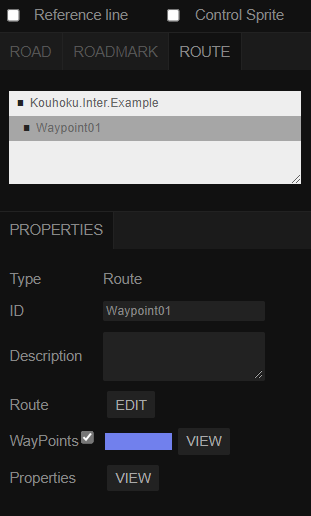
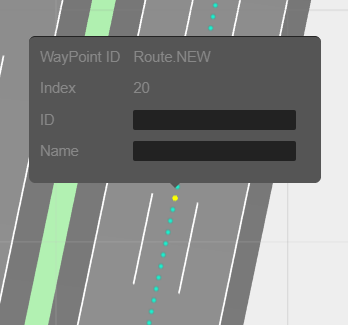
- wp_idx (int)
ウェイポイントのインデックスを指定します。RoadEditorでウェイポイントをクリックすると参照することができます。
- wp_id (string)
- end_position
自車両の終了位置を指定します。
wp_idとwp_idxで指定したウェイポイントの座標が自車両の終了位置になります。
現在未使用です。Autowareの場合、Autoware自身が持つウェイポイントの終点が終了位置になりますので、シナリオで終了位置を指定することはできません。- wp_id (string) -
start_positionのwp_idと同じです。 - wp_idx (int) -
start_positionのwp_idxと同じです。
- wp_id (string) -
- start_position
- others
他車両、歩行者等の障害物の初期状態を定義します。- actor_id (int)
対象となるアクターのIDを指定します。- start_position
- type (string)
ウェイポイントの座標で指定する場合はwaypointを指定します。アクター間の距離で指定する場合はdistanceを指定します。 - wp_id (string)
typeがwaypointのときwp_idを指定します。egoのstart_postionと同じです。 - wp_idx (int)
typeがwaypointのときwp_idxを指定します。egoのstart_postionと同じです。 - target_actor_id (int)
typeがdistanceのとき車間距離の基準となる相手のアクターを指定します。 - distance (double)
typeがdistanceのとき車間距離を指定します。 - measure_type (string)
typeがdistanceのとき車間距離をアクターの中心のからの距離で指定する場合はcenterを指定します。アクターの表面からの距離で指定する場合はsurfaceを指定します。
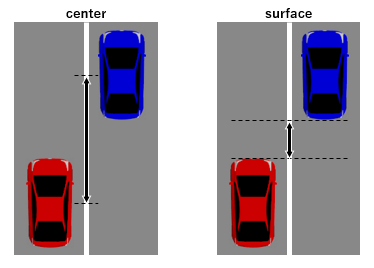
- type (string)
- start_speed
アクターの初期速度を指定します。- type (string)
絶対速度の場合はabsoluteを指定します。相対速度の場合はrelativeを指定します。- target_actor_id (int)
typeがabsoluteのとき相対速度の基準となる相手のアクターを指定します。 - value (double)
速度(km/h)を指定します。typeがabsoluteのときは絶対速度、typeがrelativeのときは相対速度を意味します。 - accel
typeがabsoluteのとき加速度を指定します。 - type (string)
徐々に加速させたい場合はspecifyを指定します。即時valueの速度にしたい場合はgods_handを指定します。 - value (double)
typeがspecifyのとき加速度(m/s2)を指定します。
- target_actor_id (int)
- type (string)
- start_position
- actor_id (int)
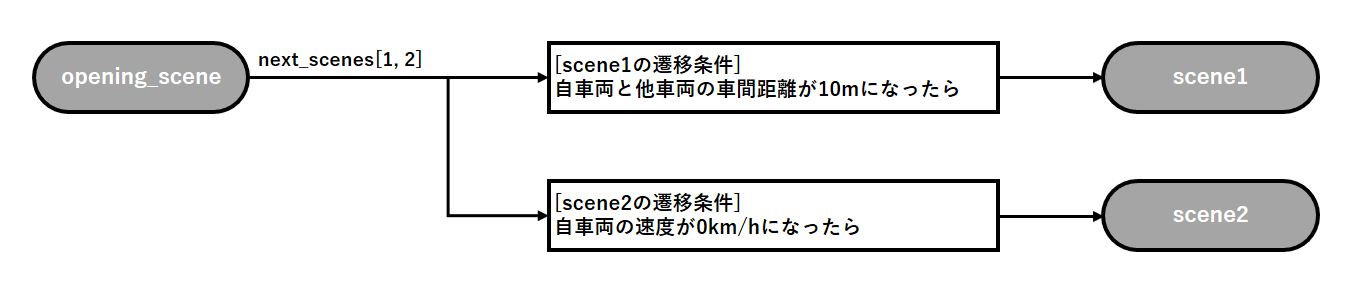
- next_scenes
次に遷移するシーンのIDを指定します。
各シーンの定義には遷移条件が設定されており、next_scenesで指定したいずれかのシーンの遷移条件がtrueとなった時点でそのシーンに遷移します。
"opening_scene": { "ego": { "start_position": { "wp_id": "Waypoint01", "wp_idx": 0 } } "others": [ { "actor_id": 1, "start_position": { "wp_id": "Waypoint01", "wp_idx": 20 }, "start_speed": { "type": "relative", "target_actor_id": 0, "vlaue": 0, }, "next_scenes": [ 1, 2 ] } ] } - ego
-
scenes
シーンを定義します。遷移条件、アクション、遷移先から構成されます。-
scene_id (int)
シーンIDを指定します。 -
duration (double)
ここで指定した時間(s)、強制的にシーンにとどまり続けます。
次のシーンへの遷移条件がtrueになっても、ここで指定した時間が経過するまで遷移しません。 -
conditions
遷移条件を定義します。- operator
複数の遷移条件をorで判定するかandで判定するかを指定します。- position
アクターが指定の位置に到達した場合の遷移条件を定義します。- actor_id (int)
対象のアクターを指定します。 - type (string)
指定のウェイポイントに到達した場合はreachを指定します。現在はreachのみ指定できます。 - wp_id (string)
typeがreachのときウェイポイントのIDを指定します。 - wp_idx (int)
typeがreachのときウェイポイントのインデックスを指定します。 - tolerance (double)
typeがreachのときwp_id、wp_idxで指定した座標の許容範囲の半径を指定します。
- actor_id (int)
- distance
アクター同士の間隔が指定の距離に到達した場合の遷移条件を定義します。- actor_id (int)
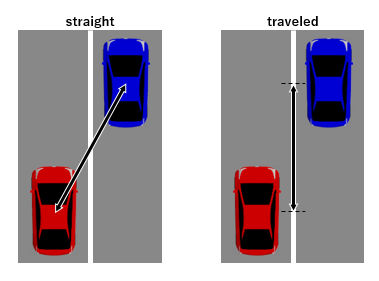
対象のアクターを指定します。 - type (string)
直線距離の場合はstraightを指定します。道路の中心線を基準にした距離の場合はtraveledを指定します。
- target_actor_id (int)
距離の基準となるアクターを指定します。 - comparison (string)
>、>=、=、<=、<のいずれかを指定します。現在は<=、<のみ指定できます。 - value (double)
距離(m)を指定します。 - measure_type (string)
アクターの中心のからの距離で指定する場合はcenterを指定します。アクターの表面からの距離で指定する場合はsurfaceを指定します。
- actor_id (int)
- speed
アクターが指定の速度に到達した場合の遷移条件を定義します。- actor_id (int)
対象のアクターを指定します。 - type (string)
絶対速度の場合はabsoluteを指定します。相対速度の場合はrelativeを指定します。 - target_actor_id (int)
typeがrelativeのとき相対速度の基準となるアクターを指定します。現在は自車のみ指定できます。 - comparison (string)
>、>=、=、<=、<のいずれかを指定します。現在は>=のみ指定できます。 - value (double)
速度(km/h)を指定します。typeがabsoluteのときは絶対速度、typeがrelativeのときは相対速度を意味します。
- actor_id (int)
- time_headway
アクターが指定した地点に到着するまでの時間が指定した時間に達した場合の遷移条件を定義します。
距離を速度で割った時間で判定します。- actor_id (int)
対象のアクターを指定します。 - wp_id (string)
ウェイポイントのIDを指定します。 - wp_idx (int)
ウェイポイントのインデックスを指定します。 - comparison (string)
>、>=、=、<=、<のいずれかを指定します。現在は<=のみ指定できます。 - value (double)
時間(s)を指定します。
- actor_id (int)
- collision
衝突時の遷移条件を定義します。 - actor_id (int)
対象のアクターを指定します。現在は自車のみ指定できます。 - simulation_time
シミュレーション開始からの経過時間の遷移条件を定義します。- comparison (string)
>=のみ指定できます。 - value (double)
時間(s)を指定します。
- comparison (string)
- position
"conditions": { "or": [ { "position": { "actor_id": 1, "type": "reach", "wp_id": "Waypoint01", "wp_idx": 125, "tolerance": 1 } }, { "speed": { "actor_id": 1, "type": "absolute", "comparison": "<=", "value": 0.1 } } ] } - operator
-
actions
シーンに遷移したときに実行するアクションを定義します。-
lane_change
レーンチェンジのアクションを定義します。- actor_id (int)
対象のアクターを指定します。 - type (string)
laneのみ指定できます。 - wp_id (string)
レーンチェンジ先のウェイポイントIDを指定します。 - time (double)
レーンチェンジにかかる時間を指定します。
- actor_id (int)
-
lane_offset
レーンの中心線から左右にオフセットするアクションを定義します。- actor_id (int)
対象のアクターを指定します。 - value (double)
レーンの中心線から左右にオフセットする距離(m)を指定します。左にオフセットする場合は+。右にオフセットする場合は-。0はレーンの中心線を走行します。 - time (double)
オフセットにかかる時間(s)を指定します。
- actor_id (int)
-
speed
速度変更のアクションを定義します。- actor_id (int)
対象のアクターを指定します。 - type (string)
絶対速度の場合はabsoluteを指定します。相対速度の場合はrelativeを指定します。 - target_actor_id (int)
typeがrelativeのとき相対速度の基準となるアクターを指定します。 - value (double)
速度(km/h)を指定します。typeがabsoluteのときは絶対速度、typeがrelativeのときは相対速度を意味します。 - accel
typeがabsoluteのとき加速度を指定します。- type (string)
徐々に加速させたい場合はspecifyを指定します。即時valueの速度にしたい場合はgods_handを指定します。 - value (double)
typeがspecifyのとき加速度(m/s2)を指定します。
- type (string)
- actor_id (int)
-
traveled_distance
車間距離を維持するアクションを定義します。- actor_id (int)
対象のアクターを指定します。 - target_actor_id (int)
車間距離の基準となる相手のアクターを指定します。 - value (double)
車間距離(m)を指定します。+は前方、-は後方になります。 - measure_type (string)
アクターの中心のからの距離で指定する場合はcenterを指定します。アクターの表面からの距離で指定する場合はsurfaceを指定します。
- actor_id (int)
-
route_move
指定した地点に移動させるアクションを定義します。地点は複数指定できます。- actor_id (int)
対象のアクターを指定します。 - type
指定したウェイポイントに向かって移動させたい場合はwaypointを指定します。(現在はアクターが歩行者の場合のみ有効です)
現在走行しているウェイポイントから左右にオフセットした位置に移動させたい場合はwp_offsetを指定します。 - route
ルートを定義します。- wp_id (string)
typeがwaypointの場合、ウェイポイントのIDを指定します。 - wp_idx (int)
typeがwaypointの場合、ウェイポイントのインデックスを指定します。 - wp_offset (double)
typeがwp_offsetの場合、レーンの中心線から左右にオフセットする距離(m)を指定します。左にオフセットする場合は+、右にオフセットする場合は-です。0はレーンの中心線を走行します。 - time (double)
前回の地点から次の地点までの移動時間(s)を指定します。速度は移動先までの距離と移動時間から自動的に計算されます。
- wp_id (string)
"route_move": { "actor_id": 1, "type": "waypoint", "route": [ { "time": 7.2, "wp_id": "Waypoint02", "wp_idx": 500, "wp_offset": 5 } ] } - actor_id (int)
-
light_state
ライトの点灯/消灯のアクションを定義します。- actor_id (int)
対象のアクターを指定します。 - blinker_left (bool)
左ウィンカーをを点灯するときはtrue、消灯するときはfalseを指定します。 - blinker_right
右ウィンカーをを点灯するときはtrue、消灯するときはfalseを指定します。 - special1
特殊なライトの点灯/消灯を行います。 点灯するときはtrue、消灯するときはfalseを指定します。
車種ごとに対象となるライトが異なります。現在緊急車両のパトライトの点灯/消灯のみ対応しています。
- actor_id (int)
-
sound_state
サイレンの鳴動/停止のアクションを定義します。- actor_id (int)
対象のアクターを指定します。 - sound (bool)
サイレンを鳴動させるときはtrue、停止するときはfalseを指定します。
- actor_id (int)
"actions": [ { "lane_change": { "actor_id": 1, "type": "lane", "wp_id": "Waypoint02", "time": 5 } } ] -
-
next_scenes -
opening_sceneのnext_scenesと同じです。 -
ending_scene
最終シーンを定義します。
このシーンに到達したらシナリオが終了になります。- scene_id -
scenesのscene_idと同じです。 - conditions -
scenesのconditionと同じです。
- scene_id -
-
"scenario": { "opening_scene": { "ego": { ... }, "others": [ ... ], "next_scenes": [ 1 ] }, "scenes": [ { "scene_id": 1, "conditions": { ... }, "actions": [ ... ], "next_scenes": [ 2 ] }, { "scene_id": 2, "conditions": { ... }, "actions": [ ... ], "next_scenes": [ 3 ] } ], "ending_scenes": [ { "scene_id": 3, "conditions": { ... } } ] } -
-
stop_conditions -
scenesのconditionsと同じです。
シナリオの終了条件を定義します。
条件が成立したら強制的にシナリオを終了します。"stop_conditions": { "or": [ { "simulation_time": { "comparison": ">=", "value": 300 } } ] }